امتلك الآن ذراعًا إضافية وتحكم بها عبر دماغك
يبذل مهندسو الروبوتات جهودًا كبيرة لتطوير هذه التقنية التي تسمح بالتحكم في «يد روبوتية إضافية»، تتراوح من عضو واحد إضافي حتى بدلة خارجية كاملة – وكل ذلك يتم التحكم فيه بعقلك. تُسمى هذا التقنية تعزيز الحركة، ويقولون إن المفتاح لتحقيقها قد يكمن في الجزء غير المستخدم من الإشارات العصبية، وذلك حسبما شرح الباحثون عنها لمجلة IEEE Spectrum.
يمكن أن يوفر هذا مستوى متقدم من الحرية دون الحاجة لاستخدام أي جزء آخر من جسدك للتحكم بها، كاستخدام يديك على عصا التحكم لتحريك العضو الروبوتي. وبدلاً من ذلك، ستتحكم فيها باستخدام عقلك – نظريًا، هذا ما يمنحك قدرات شبيهة بتلك التي يمتلكها الدكتور أوكتوبوس.
يقول الباحثون في مجلة IEEE: «إحدى الطرق الواعدة تتضمن الغرسات الدماغية المعروفة باسم واجهات الدماغ الآلية (BMI)، ولكن لأنها تتطلب جراحة لزراعتها وليست فعالة خارج بيئة المختبر، فإن BMI لا توفر مسارًا مثاليًا لتعزيز الحركة».
لكن أحدث تخطيط العضلات الكهربائي EMG تقدمًا واعدًا، إذ كشف عن وجود إشارات كهربائية ترسلها المئات من الخلايا العصبية في النخاع الشوكي إلى العضلات الهيكلية.
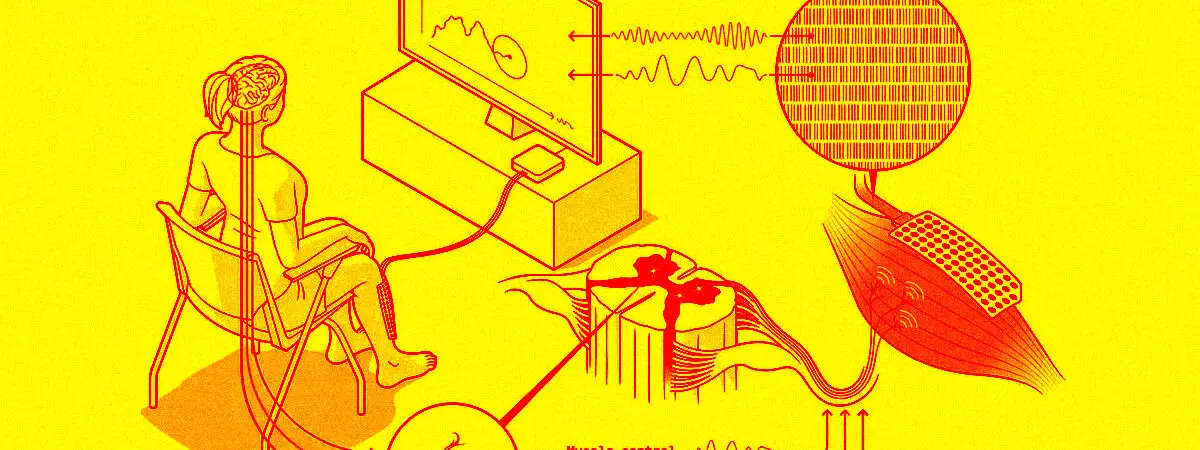
ولترجمة هذه الإشارات قاموا بإنشاء وحدة تدريب تستقبل إشارات EMG التي ينتجها المستخدم عند تنفيذ تقلصات عضلية صغيرة. ثم تقوم هذه الوحدة بتحديد نبضات الخلايا العصبية الحركية – وهي الخلايا العصبية التي تتصل بالعضلات وتأمرها بالتحرك – التي تشكل إشارات EMG. ثم تقوم وحدة التدريب بعد بضعة حسابات بتحليل العلاقة بين نبضات الخلايا العصبية الحركية وإشارات EMG، وتحول العلاقة إلى شكل رياضي متوافق.
ومن هنا تستطيع وحدة الترميز أن تعرف كيفية قراءة نشاط العصبونات الحركية في إشارات EMG الجديدة الناتجة عن نفس الشخص – ويمكنها القيام بذلك في الوقت الفعلي، وبسرعة تصل إلى بضعة ميللي ثانية – مما يتيح التحكم الفعال في هذه الروبوتات.
مع ذلك، هذا وحده لا ينفي المشاركة المباشرة لعضلاتك عند التحكم في الذراع الآلية. اكتشف الباحثون لاحقًا أن الترددات العالية في الخلايا العصبية الحركية غير مستخدمة بشكل أساسي، وإن الترددات الأقل هي المسؤولة عن التحكم الفعلي في العضلات.
لذلك قام الباحثون بتجربةٍ وضعوا فيها إلكترونات كهربائية فوق عضلة الساق الأمامية المسؤولة عن تقلص القدم.
ومرةً أخرى، حثوا المشاركين على تنفيذ تقلصات صغيرة، ومن ثم صنف الباحثون الترددات الناتجة في الخلايا العصبية إلى نطاق منخفض وآخر مرتفع، وربطوا هذه الفئات المنفصلة بحركة المؤشر الأفقية والعمودية.
وهنا لعبت قدرة المستخدم دورًا هامًا، إذ لم يكن هناك تفسير واضح حول كيفية التحكم في المؤشر بعقل المشاركين من خلال الإشارات المكتشفة في ساقهم، لكنهم وصفوا الأمر بالمثير للدهشة كيفية ايجاد المستخدمين بسرعة طريقةً لتحريك المؤشر على الشاشة بالاتجاهات التي أرادوها.
وأضافوا: «لقد تفاجأنا وتحمسنا لكيفية تحقيقهم هذه الخطوة الكبيرة الأولى بسهولة نحو العثور على طريقة تحكم عصبية منفصلة عن الحركات الطبيعية».
ومع ذلك يشير الباحثون إلى وجود الكثير من العمل الذي يتعين القيام به. فبالرغم من قيام المستخدمين بالسيطرة على حركات المؤشر، إلا أنهم لم يكونوا دقيقين بشكلٍ كافٍ، وبالتالي سيكون تطبيق هذا على ذراع آلية أكثر تعقيدًا تحديًا كبيرًا. بالإضافة إلى ذلك، ليس واضحًا ما إذا كانت أدمغتنا قادرة على التكيف مع مرور الوقت الذي سيسمح للمستخدمين بتطوير التحكم العصبي بالعضو الإضافي، أو بعبارة أخرى التعود على التكنولوجيا.
ومع ذلك، ما زال مجال الروبوتات هذا في بدايته، بالرغم من أن النتائج حتى الآن تبدو مشجعة جدًا.
- ترجمة: تمام حمزة
- تدقيق علمي ولغوي: قيس شعبية
- المصادر: 1